Sobat blogger pada pertmuan kali ini kita lanjutkan dengan membahas cara kerja GPS. Oke sobat blogger bahwasannya terdapat beberapa perbedaan metoda untuk menentukan posisi dengan menggunakan GPS. Metoda yang digunakan tergantung pada tingkat keakuratan yang dikehendaki pemakai dan jenis penerima GPS . Secara teknik metode-metose tersebut dapat dikelompokkan menjadi 4 metode dasar yaitu:

Gambar 1. Pendeteksian posisi kapal laut
1. Koreksi Perbedaan Posisi
Sebagaimana telah diketahui, data GIS dan DGPS, mempunyai keakuratan dalam menentukan posisi antara 0.5 sampai 5 m. Biasanya digunakan untuk navigasi kapal di dekat pantai, akusisi data GIS, membentuk presisi dan sebagainya.

Gambar 2. Pendeteksian posisi orang di tengah lautan
Navigasi autonomous menggunakan receiver single stand-alone, digunakan oleh pejalan kaki, kapal yang jauh ditengah lautan dan militer. Akurasi posisi lebih baik dari pada 100 m untuk pemakaian sipil dan sekitar 20 m untuk pemakaian militer. Sedangkan untuk pemakaian pengukuran/pemetaan tanah, kontrol mesin diperoleh perbedaan posisi dengan ketelitian 0.5–20 m.

Gambar 3. Pemanfaatan GPS untuk pengukuran/pemetaan tanah
2. Navigasi Sederhana
Ini merupakan teknik atau metode yang sangat sederhana, dengan receiver GPS untuk sesaat memberikan posisi, ketinggian aman atau waktu yang akurat pada pemakai. Akurasi yang diperoleh lebih baik dari pada 100 m (biasanya sekitar 30-50m) untuk pemakaian sipil dan 5-15 untuk pemakaian militer. Alasan perbedaan tingkat akurasi antara pemakaian sipil dan militer akan diulas dalam pembahasan selanjutnya. Receiver GPS yang digunakan untuk operasi dengan metode jenis ini pada umumnya bentuk fisiknya relatif kecil, dapat dibawa (portable) dan harganya terjangkau (murah).

Gambar 4. GPS portable sederhana
Semua posisi GPS didasarkan pada pengukuran satelit ke receiver GPS di bumi. Jarak ini ke setiap satelit dapat ditentukan dengan receiver GPS. Ide dasarnya adalah seperti prinsip yang digunakan pada pengukuran/pemetaan tanah dalam bekerja setiap harinya . JIka sobat blogger tahu 3 buah tiitik relatif terhadap posisi sobat blogger, maka sobat blogger dapat menentukan posisi sobat blogger sendiri relatif terhadap 3 titik tersebut. Dari jarak ke satelit diketahui bahwa posisi receiver harus pada beberpa titik permukaan dari ruang imaginer yang merupakan asli bagi satelit. Dengan membuat perpotongan ke 3 titik ruang imaginer posisi receiver dapat ditentukan.

Gambar 5. Penentuan posisi dengan 3 satelit
Masalahnya hanya menggunakan pseudorange dan lamanya waktu yang sampai pada receiver, sedangkan jarak dapat ditentukan . Jadi terdapat 4 hal yang tidak diketahui untuk menentukan posisi (X,Y, Z) dan waktu perjalanan sinyal . Pengamatan 4 satelit menghasilkan 4 persamaan yang dapat diselesaikan, sehingga memungkinkan untuk ditentukan besarnya.

Gambar 6. Penentuan posisi dengan 4 satelit
3. Menghitung Jarak Satelit
Pada tingkat penghitungan jarak masing-masing satelit, menggunakan salah satu rumus Issac Newton yaitu tentang gerak, Jarak = Kecepatan X Waktu. Dengan persamaan tersebut memungkinkan untuk menghitung jarak sebuah kererta api yang sedang berjalan jika diketahui kecepatan perjalanan kereta api dan waktu yang digunakan pada kecepatan tersebut.
GPS memerlukan receiver untuk menghitung jarak dari receiver ke satelit. Kecepatan yang digunakan sama dengan kecepatan gelombang radio. Gelombang radio berjalan pada kecepatan cahaya 290 000 Km/detik. Sedangkan waktu adalah waktu yang digunakan sinyal radio berjalan dari satelit ke receiver GPS. Hal ini sedikit lebih sulit untuk dihitung, karena harus diketahui sinyal kapal meninggalkan satelit dan kapan sinyal sampai di receiver.
Perhitungan Waktu
Sinyal satelit merupakan isyarat yang mempunyai dua kode, yaitu kode C/A dan kode P. Kode C/A didasarkan pada waktu pemberian clock atomic yang sangat akurat. Receiver juga mempunyai sinyal clock yang digunakan untuk membangkitkan kode C/A yang sesuai. Reeiver GPS mampu menyesuaikan atau mengkaitkan kode sinyal satelit yang datang untuk membangkitkan kode receiver.
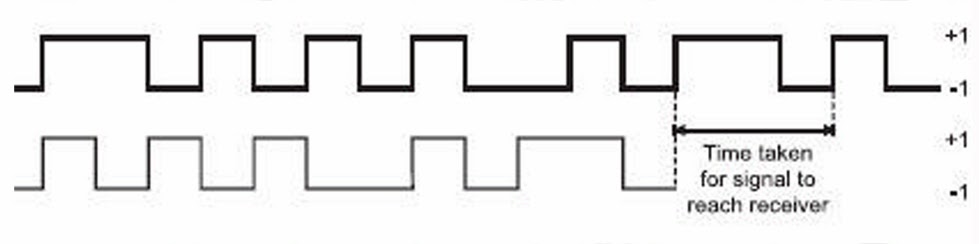
Gambar 7. Hubungan pulsa/sinyal receiver dan pulsa/sinyal satelit
Kode C/A merupakan kode digital yang muncul secara acak. Dalam kenyataannya ini tidak acak, berulang seribu kali perdetik. Dengan cara ini waktu dihitung, diambil perjalanan sinyal dari satelit ke receiver GPS.
4. Perhitungan Posisi
Pada prinsipnya mengukur waktu perpindahan sinyal (evaluasi cakupan semu). Dalam receiver GPS, menentukan posisi memiliki sinyal penerima dari 4 satelit yang berbeda. (saluran 1 sampai saluran 4) yang memungkinkan untuk menghitung t1 sampai t4.

Gambar 8. Penentuan posisi dengan 4 satelit
Perhitungan dipengaruhi oleh Cartesian koordinat tiga dimensi sistem dengan geometris asli. Cakupan dari pemakai 4 satelit R1, R2, R3 dan R4 dapat ditentukan dengan bantuan waktu pemindahan sinyal t1, t2, t3 dan t4 antara 4 satelit dan pemakai. Sedang lokasi Xsat, Ysat dan Zsat dari 4 satelit telah diketahui pemakai dengan demikian koordinat dapat dihitung.

Gambar 9. Perhitungan posisi ( t )
t pengukuran = t = t + t o
PSR = t pengukuran ‘X c = (t + t 0) x C
PSR = (R + t 0) x C
dimana :
R : cakupan satelit dengan pemakai yang sebenarnya
C : kecepatan cahaya
t : waktu perpindahan sinyal dari satelit pada pemakai
t 0 : perbedaan antara clock satelit dan clock pemakai.
PSR: cakupan semu. pseudo-range_
Jarak R dari satelit ke pemakai dapat dihitung dalam sistem Cartesian sebagai berikut :
R = (XSat - XUser) + (YSat - YUser) + (ZSat - ZUser)
Berikut ini valid untuk empat satelit (I = 1 sampai 4)
Tidak ada komentar:
Posting Komentar