Kadang-kadang untuk menjalankan
peralatan listrik dibutuhkan dua kecepatan yang berbeda. Ini biasanya
diperlukan pada aplikasi tertentu di industri, seperti kecepatan motor pengaduk,
ventilasi pompa, proses kontrol terpadu. Khususnya pada pengontrolan terpadu,
dimana komponen yang digunakan pada pengontrolan terpadu digabungkan, komponen
yang digunakan tersebut digabung dengan komponen yang digunakan secara cepat
dan lambat dengan sangat akurat. Untuk merealisasikan ini, dipergunakan motor
dua kecepatan.
Mengatur kecepatan
putar motor induksi berbasis pada rumus :
n = 60.f / p, dimana n = kecepatan putar motor (rpm), f = frekuensi
sumber listrik (50 Hz) dan p = jumlah pasang kutub. Dengan demikian untuk mengatur
kecepatan putar motor induksi dapat dilakukan dengan mengatur jumlah kutub atau
besaran frekuensi sumber listrik, motor yang dapat diatur jumlah kutubnya salah
satunya adalah motor dahlander. Secara kelistrikan kumparan motor dibagi dua.
Rangkaian kontrol menghubungkan kumparan motor pada konvigurasi yang berbeda
yang menyebabkan perubahan kecepatan dari suatu kecepatan tertentu ke yang
lainnya. Masing-masing kumparan dapat menyalurkan daya motor pada kecepatan tertentu.
Pengoperasian dan pengendalian kecepatan putar motor induksi 3 fasa dengan
mengatur jumlah kutub-kutubnya pada motor dahlander diperlihatkan seperti pada gambar 1
dan 2 berikut ini.

Gambar 1. Diagram kontrol pengoperasian motor dahlander

Gambar 2. Diagram utama pengoperasian motor dahlander
Melalui pengontrolan
seperti pada gambar 1, motor seperti pada gambar 2 dapat diatur putarannya pada
1440 rpm atau 2800 rpm yaitu dengan menekan tombol ON1 atau ON2. Tipe
lain dari motor induksi 3 fasa yang kecepatan putarnya dapat diatur adalah
motor Separate Winding yang
pengendalian dan pengoperasiannya sama seperti pada motor dahlander atau dengan
cara lain seperti ditunjukan pada gambar 3 dan 4 berikut ini.
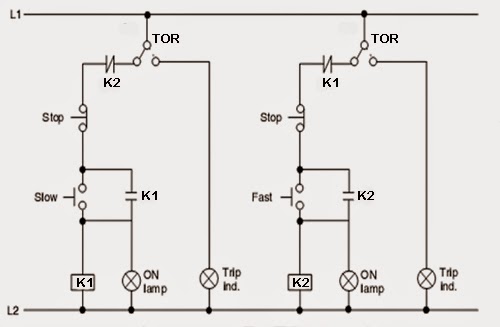
Gambar 3. Diagram kontrol pengoperasian motor separate winding
Seperti yang
ditunjukan pada gambar 3 di atas, dua buah kontaktor disertakan untuk kecepatan rendah dan
tinggi. Kedua kontaktor tersebut secara kelistrikan tidak boleh bekerja
bersamaan. Untuk memproteksinya dipisahkan oleh masing-masing proteksi beban
lebih dan diamankan dengan menyilangkan kontak NC masing-masing kontaktor.

Gambar 4. Diagram utama pengoperasian motor separate winding
Komentar ini telah dihapus oleh pengarang.
BalasHapusBagus tambah reverensi. Dilengkapi kalo yang dirubah freqwensinya
BalasHapusItu gambar 1 K2 buat apa dipasang kalau gak ada fungsj
BalasHapusRalat k3
Hapus